Unwind & Control Module
Key Components
- HMI 19 inch or larger touch screen graphical GUI and PC control
- System power contactors and safety
- Air/Vacuum Control
- Delta Tau Real Time Motion System Controller
- Teknek Web Nano Particle Cleaner
- Vetaphone Corona (or plasma)
- Unwind with Interleaf stripping capability
- Ultrasonic Edge Sensor for Tracking
- Gigabit Ethernet Communication
- D/A; A/D and Digital I/O User Configurable
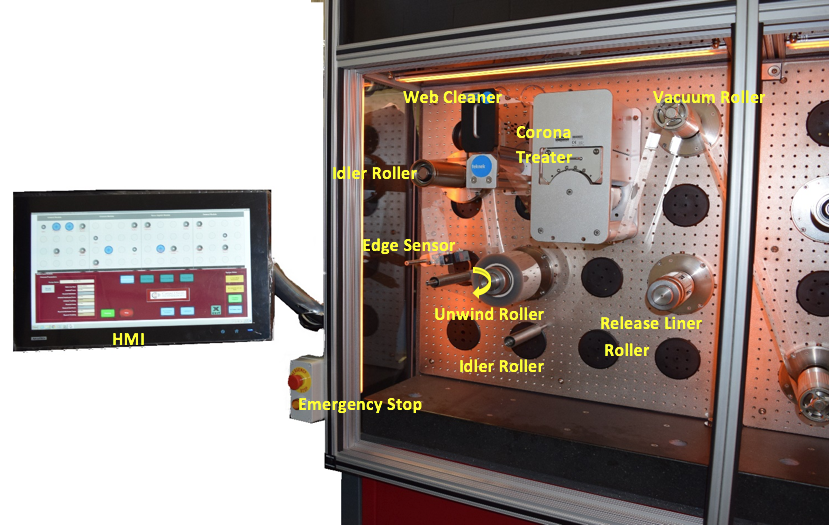
The purpose of this module is to provide a centralized HMI (Human Machine Interface) platform from which to control a web manufacturing process and to unwind the web from a 3 inch diameter core on which it is received and to begin processing. An ultrasonic transducer senses the position of the edge of the web and the unwind roller has a translational actuator to maintain position. The standard unwind includes a Teknek web cleaning which removes particulate from the surface of the web using tacky rollers and a consumable tacky material. The web can then be treated with a corona or plasma treater made by Vetaphone and then the web is pulled to the next vacuum roller and exits the system. In cases where there is a release liner, there is a roller for winding up the liner.
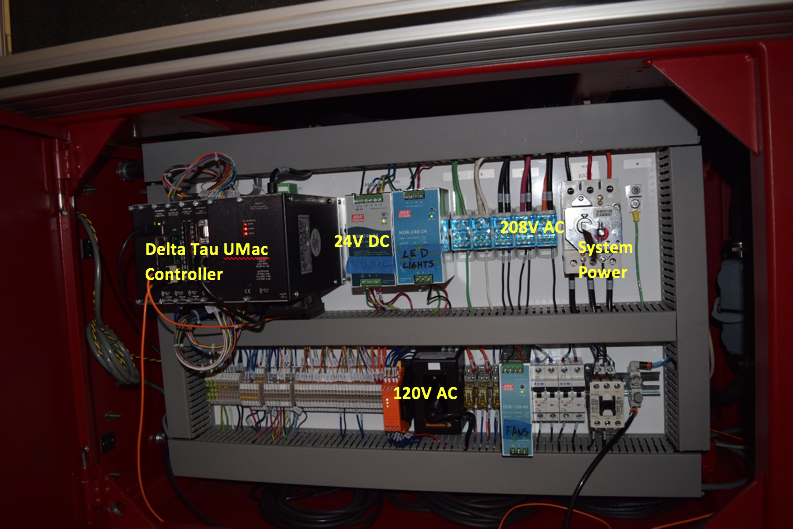
All of the functions of the Unwind Module are supported by the infrastructure electronics on the panels in the front and back lower enclosures. The Unwind module is unique in that all of the facility power and air are connected to and then fed from this module. The system requires three phase 208 Volts with neutral and earth ground. The power is fed out of this module to the next module on the right via a heavy duty connector on the end of a 3 foot cable.
Communication between modules is via Ethernet and optical fiber between the Delta Tau real-time operating system controller and PLC and the Yaskawa motor amplifiers. The HMI communicates with the Delta Tau via USB 2.0 serial connection and can also address the Ethernet switches within the system. There are 16 channels of 24V digital input and output and 4 channels of 10V A/D and of D/A capability. The corona system utilizes one channel of the D/A out to control the power setting of the corona unit. The I/O channels are all accessed via a Modbus implementation and are thus seen as registers or memory locations within the Delta Tau controller. Additionally, other networked devices maybe directly addressed by the system HMI. There is 24V dc available to power sensors or accessories.
There is a system Estop or emergency circuit which traverses the unit and is part of the connection circuit from the incoming module to the outgoing module. Breaking that circuit causes an immediate fault on all the amplifiers for all motors and puts the system in an emergency stop condition. All modules may have an additional switch added into that circuit to provide the immediate means of system shutdown within the module.
TECHNICAL SPECIFICATIONS
UNWIND UNIT DATA
| Control Hardware & Software | PC HMI Graphical Interface with Complete Integrated Control |
| User Interface | One 19″ Touch-Screen |
| Web Tension Control | PID Control, load cell feedback and servo motor torque control |
| Winding Weight | <40kg |
| Edge Guide | +-0.1mm |
| Sensor Type | Ultrasonic/Optical |
| Winding Accuracy | <100um |
| AntiStatic Bar | 1 Antistatic bar after protecitve film removal |
| Corona Output | 5W-1kW |
| Tension Control | Active Tension Control |
| Speed Control | Active Speed Control and Feedback to Rewind Unit |
| Web Cleaning Method | Contactless/Contacted |
Unwinder Layout
Figure 1: Unwinder Layout
Front Panel Layout
Figure 2: Front Panel Layout

Rear Panel
Figure 3: Rear Panel

Corona-Power-Supply
Figure 4: Corona Power Supply

Unwind-and-Control-Module2